
42mm Nema 17 12V Dc 70 Oz.In Hybrid Stepper Motor For 3D Printers JK42HS48
42mm Nema17 12V dc 70 oz.in hybrid Stepper Motor for 3D printers JK42HS48
1) Product Description and images
There are many structural forms and classification methods of stepper motors, which are generally divided into three types according to the excitation mode: reluctance type, permanent magnet type and mixed magnet type; According to the number of phases, it can be divided into single-phase, two-phase, three-phase and multi equal forms.
The running performance of stepping motor is closely related to the control mode. From the perspective of its control mode, it can be divided into the following three categories: open-loop control system, closed-loop control system and semi closed-loop control system. Semi closed loop control system is generally classified as open loop or closed loop system in practical application.

2) Product DataSheet
| Genaral Specification: | ||||||||||
| Item | Specifications | |||||||||
| Step Angle | 1.8° | |||||||||
| Temperature Rise | 80℃max | |||||||||
| Ambient Temperature | -20℃~+50℃ | |||||||||
| Insulation Resistance | 100 MΩ Min. ,500VDC | |||||||||
| Dielectric Strength: | 500VAC for 1minute | |||||||||
| Shaft Radial Play | 0.02Max. (450g-load) | |||||||||
| Shaft Axial Play | 0.08Max. (450g-load) | |||||||||
| Max. radial force | 28N (20mm from the flange) | |||||||||
| Max. axial force | 10N | |||||||||
| Electrical Specifications: | ||||||||||
| Model No. | Step Angle | Motor Length | Current /Phase |
Resistance /Phase |
Inductance /Phase |
Holding Torque | # of Leads | Detent Torque | Rotor Inertia | Weight |
| ( °) | (L)mm | A | Ω | mH | kg.cm | No. | g.cm | g.cm2 | Kg | |
| JK42HS25-0404 | 1.8 | 25 | 0.4 | 24 | 36 | 1.8 | 4 | 75 | 20 | 0.15 |
| JK42HS28-0504 | 1.8 | 28 | 0.5 | 20 | 21 | 1.5 | 4 | 85 | 24 | 0.22 |
| JK42HS34-1334 | 1.8 | 34 | 1.33 | 2.1 | 2.5 | 2.6 | 4 | 120 | 34 | 0.22 |
| JK42HS34-0406 | 1.8 | 34 | 0.4 | 24 | 15 | 1.6 | 6 | 120 | 34 | 0.22 |
| JK42HS34-0956 | 1.8 | 34 | 0.95 | 4.2 | 2.5 | 1.6 | 6 | 120 | 34 | 0.22 |
| JK42HS40-0406 | 1.8 | 40 | 0.4 | 30 | 30 | 2.6 | 6 | 150 | 54 | 0.28 |
| JK42HS40-1684 | 1.8 | 40 | 1.68 | 1.65 | 3.2 | 4.2 | 4 | 150 | 54 | 0.28 |
| JK42HS40-1206 | 1.8 | 40 | 1.2 | 3 | 2.7 | 2.9 | 6 | 150 | 54 | 0.28 |
| JK42HS48-0406 | 1.8 | 48 | 0.4 | 30 | 25 | 3.1 | 6 | 260 | 68 | 0.35 |
| JK42HS48-1684 | 1.8 | 48 | 1.68 | 1.65 | 2.8 | 5.0 | 4 | 260 | 68 | 0.35 |
| JK42HS48-1206 | 1.8 | 48 | 1.2 | 3.3 | 2.8 | 3.17 | 6 | 260 | 68 | 0.35 |
| JK42HS60-0406 | 1.8 | 60 | 0.4 | 30 | 39 | 6.5 | 6 | 280 | 102 | 0.5 |
| JK42HS60-1704 | 1.8 | 60 | 1.7 | 3 | 6.2 | 7.3 | 4 | 280 | 102 | 0.5 |
| JK42HS60-1206 | 1.8 | 60 | 1.2 | 6 | 7 | 5.6 | 6 | 280 | 102 | 0.5 |
| We provide customized service to add gearbox, encoder, brake and integrated driver. | ||||||||||
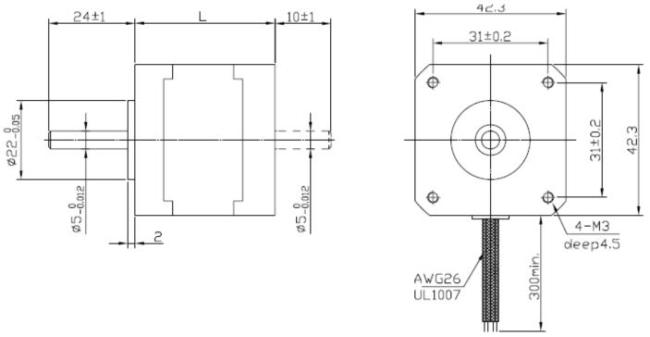
3) Product Drawing
| Stepper Motor Series | |||||
| Motor series | Phase No. | Step angle | Motor size | Motor length | Holding torque |
| Nema 8 | 2 phase | 1.8 degree | 20x20mm | 30~42mm | 180~300g.cm |
| Nema 11 | 2 phase | 1.8 degree | 28x28mm | 32~51mm | 430~1200g.cm |
| Nema 14 | 2 phase | 1.8 degree | 35x35mm | 27~42mm | 1000~2000g.cm |
| Nema 16 | 2 phase | 1.8 degree | 39x39mm | 20~44mm | 650~2800g.cm |
| Nema 17 | 2 phase | 1.8 degree | 42x42mm | 25~60mm | 1.5~7.3kg.cm |
| Nema 23 | 2 phase | 1.8 degree | 57x57mm | 41~112mm | 0.39~3.1N.m |
| Nema 24 | 2 phase | 1.8 degree | 60x60mm | 56~111mm | 1.17~4.5N.m |
| Nema 34 | 2 phase | 1.8 degree | 86x86mm | 67~155mm | 3.4~12.2N.m |
| Nema 42 | 2 phase | 1.8 degree | 110x110mm | 99~201mm | 11.2~28N.m |
| Nema 52 | 2 phase | 1.8 degree | 130x130mm | 173~285mm | 13.3~22.5N.m |
The speed of the stepping motor depends on the pulse frequency, the number of rotor teeth and the number of beats. Its angular velocity is proportional to the pulse frequency and synchronized with the pulse in time. Therefore, when the number of rotor teeth and the number of running beats are constant, the required speed can be obtained as long as the pulse frequency is controlled. Since the stepping motor is started by its synchronous torque, the starting frequency is not high in order to avoid out of step. In particular, with the increase of power, the rotor diameter increases, the inertia increases, and the starting frequency and the maximum operating frequency may differ by as much as ten times.
The starting frequency characteristic of the stepping motor makes it impossible to directly reach the operating frequency when the stepping motor is started. Instead, there must be a starting process, that is, from a low speed to the operating speed. The operating frequency cannot be immediately reduced to zero when stopping, but there must be a high-speed gradual reduction to zero.
Get in Touch
Have questions about our products or want to discuss a custom order? Our team is ready to help you.