
Nema52 2phase Hybrid Stepper Motor With Holding Torque 25N.m / 30N.m / 40N.m / 50N.m
Nema52 2phase Hybrid Stepper Motor With Holding Torque 25N.m / 30N.m / 40N.m / 50N.m
All motors convert electrical power, volts and amps, into mechanical power, torque and speed. The unique feature of stepper motors is that they can be very accurately controlled in terms of speed and rotation angle. In order to control the rotation, electrical pulses are input into the driver, and the motor rotates one step for each pulse. The excellent stability of the motor results in a simple control circuit, since the motor can be run open-loop and no feedback is required.
1.Genaral Specification
| Item | Specifications |
| Step Angle | 1.8° |
| Temperature Rise | 80℃max |
| Ambient Temperature | -20℃~+40℃ |
| Insulation Resistance | 100 MΩ Min. ,500VDC |
| Dielectric Strength | 1000VAC 50Hz 2mA 1minute |
| Insulation Class | B |
2.Electrical Specification:
| Model No. | Operating Voltage | Rated Current | Resistance | Inductance | Holding Torque | Noload Frequency | Starting Frequency | Weight | Length |
| VDC | A | Ω | mH | N.m | No. | g.cm | kg | mm | |
| JK130HS173-6004 | 80~325 | 6 | 0.75 | 12.6 | 25 | 25000 | 2300 | 13.3 | 173 |
| JK130HS229-6004 | 80~325 | 6 | 0.83 | 13.2 | 30 | 25000 | 2300 | 18 | 229 |
| JK130HS257-7004 | 80~325 | 7 | 0.73 | 11.7 | 40 | 25000 | 2300 | 19 | 257 |
| JK130HS285-7004 | 80~325 | 7 | 0.66 | 10 | 50 | 25000 | 2300 | 22.5 | 285 |

Matching Stepper motor Driver: JK2M2283
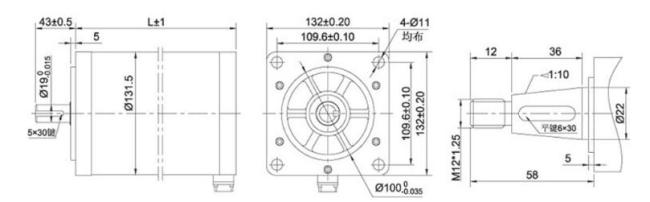
3.Dimensions: (Unit=mm)
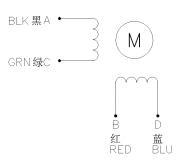
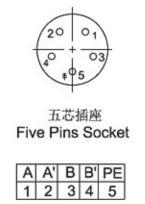
4.Wiring Diagram:
5.Applications:
- 3d printers
- CNC routers
- Engraving Machines
- Carving machine
- Digital controlled machinery
- Medical instrument
6.Stepper Motor Advantages
- Low cost for control achieved
- High torque at startup and low speeds
- Ruggedness
- Simplicity of construction
- Can operate in an open loop control system
- Low maintenance
- Less likely to stall or slip
- Will work in any environment
- Can be used in robotics in a wide scale.
- High reliability
- The rotation angle of the motor is proportional to the input pulse.
- The motor has full torque at standstill (if the windings are energized)
- Precise positioning and repeatability of movement since good stepper motors have an accuracy of 3–5% of a step and this error is non-cumulative from one step to the next.
- Excellent response to starting/stopping/reversing.
- Very reliable since there are no contact brushes in the motor. Therefore, the life of the motor is simply dependent on the life of the bearing.
- The motors response to digital input pulses provides open-loop control, making the motor simpler and less costly to control.
- It is possible to achieve very low-speed synchronous rotation with a load that is directly coupled to the shaft.
- A wide range of rotational speeds can be realized as the speed is proportional to the frequency of the input pulses.
Get in Touch
Have questions about our products or want to discuss a custom order? Our team is ready to help you.