
425oz 3Nm 112mm 1.8 Degree Hybrid Stepper Motor For Cnc Machine
425oz.In 3N.m 112mm 1.8 Degree NEMA23 Stepping Motor for cnc machine
Nema 23 stepping motor is suitable for 3d printer, robot arm, cnc machine,etc. In low-speed applications, the stepper motor can be driven at the desired speed without missing a single step.
This stepper motor has different torque, the max torque is 3 Nm. We provide nema 23 stepper motor datasheet and torque curve. The torque is different for each operating speed, but decreases as the stepping speed increases. The reason is the operating principle of the stepper motor. The drive signal of the stepper motor generates a magnetic field in the coil of the motor to generate a step force. The time it takes for the magnetic field to reach its maximum intensity depends on the inductance of the coil, the drive voltage and current limit. As the drive speed increases, the coil maintains its full strength for a shorter period of time and the torque that the motor can produce decreases.
NEMA23 Stepping Motor Genaral Specification:
| Item | Specifications |
| Step Angle | 1.2° |
| Temperature Rise | 80℃max |
| Ambient Temperature | -20℃~+50℃ |
| Insulation Resistance | 100Ω Min. ,500VDC |
| Dielectric Strength | 500VAC for 1minute |
| Shaft Radial Play | 0.02Max. (450g-load) |
| Shaft Axial Play | 0.08Max. (450g-load) |
| Max. radial force | 75N (20mm from the flange) |
| Max. axial force | 15N |
NEMA23 Stepping Motor Specifications:
| Model No. | Motor Length |
Current /Phase |
Resistance /Phase |
Inductance /Phase |
Holding Torque | # of Leads | Detent Torque | Rotor Inertia | Mass |
| (L)mm | A | Ω | mH | N.m | No. | g.cm | g.cm | Kg | |
| JK57HS41-1006 | 41 | 1 | 7.1 | 8 | 0.48 | 6 | 250 | 150 | 0.47 |
| JK57HS41-2008 | 41 | 2 | 1.4 | 1.4 | 0.39 | 8 | 250 | 150 | 0.47 |
| JK57HS41-2804 | 41 | 2.8 | 0.7 | 1.4 | 0.55 | 4 | 250 | 150 | 0.47 |
| JK57HS51-1006 | 51 | 1 | 6.6 | 8.2 | 0.72 | 6 | 300 | 230 | 0.59 |
| JK57HS51-2008 | 51 | 2 | 1.8 | 2.7 | 0.9 | 8 | 300 | 230 | 0.59 |
| JK57HS51-2804 | 51 | 2.8 | 0.83 | 2.2 | 1.01 | 4 | 300 | 230 | 0.59 |
| JK57HS56-2006 | 56 | 2 | 1.8 | 2.5 | 0.9 | 6 | 350 | 280 | 0.68 |
| JK57HS56-2108 | 56 | 2.1 | 1.8 | 2.5 | 1 | 8 | 350 | 280 | 0.68 |
| JK57HS56-2804 | 56 | 2.8 | 0.9 | 2.5 | 1.2 | 4 | 350 | 280 | 0.68 |
| JK57HS64-2804 | 64 | 2.8 | 0.8 | 2.3 | 1 | 4 | 400 | 300 | 0.75 |
| JK57HS76-2804 | 76 | 2.8 | 1.1 | 3.6 | 1.89 | 4 | 600 | 440 | 1.1 |
| JK57HS76-3006 | 76 | 3 | 1 | 1.6 | 1.35 | 6 | 600 | 440 | 1.1 |
| JK57HS76-3008 | 76 | 3 | 1 | 1.8 | 1.5 | 8 | 600 | 440 | 1.1 |
| JK57HS82-3004 | 82 | 3 | 1.2 | 4 | 2.1 | 4 | 1000 | 600 | 1.2 |
| JK57HS82-4008 | 82 | 4 | 0.8 | 1.8 | 2 | 8 | 1000 | 600 | 1.2 |
| JK57HS82-4204 | 82 | 4.2 | 0.7 | 2.5 | 2.2 | 4 | 1000 | 600 | 1.2 |
| JK57HS100-4204 | 100 | 4.2 | 0.75 | 3 | 3 | 4 | 1100 | 700 | 1.3 |
| JK57HS112-3004 | 112 | 3 | 1.6 | 7.5 | 3 | 4 | 1200 | 800 | 1.4 |
| JK57HS112-4204 | 112 | 4.2 | 0.9 | 3.8 | 3.1 | 4 | 1200 | 800 | 1.4 |
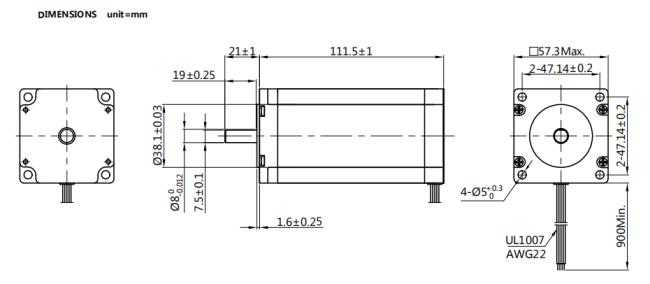
NEMA23 Stepping Motor Dimensions:(Unit=mm)
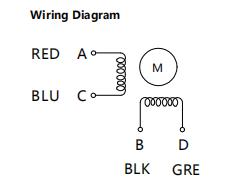
NEMA23 Stepping Motor Wiring Diagram:
NEMA23 Stepping Motor pictures:


NEMA23 Stepping Motor Advantages
- Low cost for control achieved
- High torque at startup and low speeds
- Ruggedness
- Simplicity of construction
- Can operate in an open loop control system
- Low maintenance
- Less likely to stall or slip
- Will work in any environment
- Can be used in robotics in a wide scale.
- High reliability
- The rotation angle of the motor is proportional to the input pulse.
- The motor has full torque at standstill (if the windings are energized)
- Precise positioning and repeatability of movement since good stepper motors have an accuracy of 3–5% of a step and this error is non-cumulative from one step to the next.
- Excellent response to starting/stopping/reversing.
- Very reliable since there are no contact brushes in the motor. Therefore, the life of the motor is simply dependent on the life of the bearing.
- The motors response to digital input pulses provides open-loop control, making the motor simpler and less costly to control.
- It is possible to achieve very low-speed synchronous rotation with a load that is directly coupled to the shaft.
- A wide range of rotational speeds can be realized as the speed is proportional to the frequency of the input pulses.
NEMA23 Stepping Motor Applications
- Computer controlled stepper motors are a type of motion-control positioning system. They are typically digitally controlled as part of an open loop system for use in holding or positioning applications.
- In the field of lasers and optics they are frequently used in precision positioning equipment such as linear actuators, linear stages, rotation stages, goniometers, and mirror mounts. Other uses are in packaging machinery, and positioning of valve pilot stages for fluid control systems.
- Commercially, stepper motors are used in floppy disk drives, flatbed scanners, computer printers, plotters, image scanners, compact disc drives, intelligent lighting, camera lenses, CNC machines and, more recently, in 3D printers.
Get in Touch
Have questions about our products or want to discuss a custom order? Our team is ready to help you.