
1.8deg 1A 3kg.cm 320mm 4 Wires Nema 17 Linear Stepping Motor
1.8° 1A 3kg.cm 320mm 4wires Nema17 linear stepping motor
Similar to their rotary counterparts in operation and performance, a linear stepper motor is typically run as open-loop systems and are capable of providing high resolution at high speeds and accelerations.The linear stepper motor almost exclusively employs a hybrid design, with two main parts—a base (also referred to as a platen) and a slider (also referred to as a forcer).
1.Genaral Specification of nema 17 stepper motors:
- Step angle: 1.8°
- Temperature rise: below 80 ℃
- Ambient temperature: -20 ℃ ~ + 50 ℃
- Insulation resistance: minimum 100MΩ, 500VDC
- Dielectric strength: 500VAC for 1 minute
- Shaft radial clearance: 0.02 max (450 g load)
- Shaft axial clearance: 0.08Max. (450 g load)
- Maximum radial force: 28N (20mm from flange)
- Maximum axial force: 10N
- size: Approximately 42x42x34mm
2.Electrical Specification of 42mm stepper moror:
|
Model No. |
Step Angle |
Motor Length |
Current /Phase |
Resistance /Phase |
Inductance /Phase |
Holding Torque |
# of Leads |
Detent Torque |
Rotor Inertia |
Mass |
| ( °) | (L)mm | A | Ω | mH | N.m | No. | g.cm | g.cm² | Kg | |
| JK42HS25-0404 | 1.8 | 25 | 0.4 | 24 | 36 | 1.8 | 4 | 75 | 20 | 0.15 |
| JK42HS34-1334 | 1.8 | 34 | 1.33 | 2.1 | 2.5 | 2.2 | 4 | 120 | 34 | 0.22 |
| JK42HS40-1684 | 1.8 | 40 | 1.68 | 1.65 | 3.2 | 3.6 | 4 | 150 | 54 | 0.28 |
| JK42HS48-1684 | 1.8 | 48 | 1.68 | 1.65 | 2.8 | 4.4 | 4 | 260 | 68 | 0.35 |
| JK42HS60-1004 | 1.8 | 60 | 1.0 | 8 | 13 | 7.5 | 4 | 280 | 102 | 0.5 |
3.Screw rod Specification:
|
Screw Diameter(mm) |
Screw Lead(mm) |
Screw Pitch(mm) |
Travel per step(mm) |
Screw Diameter(mm) |
Screw Lead(mm) |
Screw Pitch(mm) |
Travel per step(mm) |
| Tr5 | 1 | 1 | 0.005 | Tr8 | 8 | 2 | 0.04 |
| 2 | 1 | 0.01 | 10 | 2 | 0.05 | ||
| Tr6 | 2 | 1 | 0.01 | 12 | 2 | 0.06 | |
| 4 | 1 | 0.02 | 14 | 2 | 0.07 | ||
| 6 | 1 | 0.03 | Tr10 | 2 | 2 | 0.01 | |
| 12 | 2 | 0.06 | 3 | 1.5 | 0.015 | ||
| Tr8 | 1 | 1 | 0.005 | 4 | 2 | 0.02 | |
| 2 | 2 | 0.01 | 8 | 2 | 0.04 | ||
| 3 | 1.5 | 0.015 | 10 | 2 | 0.05 | ||
| 4 | 2 | 0.02 | 12 | 2 | 0.06 |
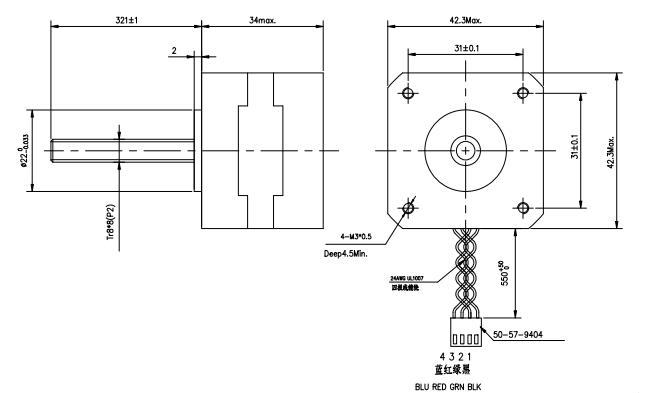
4.Drawing of 42HS step motor:
5.Produce equipment:

6.Production Process:

7.Advantages of Hybrid Stepper Motor
- Low cost for control achieved
- High torque at startup and low speeds
- Ruggedness
- Simplicity of construction
- Can operate in an open loop control system
- Low maintenance
- Less likely to stall or slip
- Will work in any environment
- Can be used in robotics in a wide scale.
- High reliability
- The rotation angle of the motor is proportional to the input pulse.
- The motor has full torque at standstill (if the windings are energized)
- Precise positioning and repeatability of movement since good stepper motors have an accuracy of 3–5% of a step and this error is non-cumulative from one step to the next.
- Excellent response to starting/stopping/reversing.
- Very reliable since there are no contact brushes in the motor. Therefore, the life of the motor is simply dependent on the life of the bearing.
- The motors response to digital input pulses provides open-loop control, making the motor simpler and less costly to control.
- It is possible to achieve very low-speed synchronous rotation with a load that is directly coupled to the shaft.
- A wide range of rotational speeds can be realized as the speed is proportional to the frequency of the input pulses.
8.Applications of step motors:

Get in Touch
Have questions about our products or want to discuss a custom order? Our team is ready to help you.