
20LHS Series 60N Force 2 Phase Nema8 Captive Hybrid linear Stepper Motors Linear Acuators
1. Hybrid Linear Stepper Motor
Hybrid linear stepper motor is a new linear movement executive motion control product, converting the round rotation movement into linear movement.
The hybrid linear stepper motor is composed of driving motors, deceleration gears, screws, nuts, guides, push rods, slides, spring, shells and turbine, micro -control switch, etc.
Generally, the standard stroke of the electric screw is 100,150, 200, 250, 300, 350, 400mm, while special stroke requirements can be supported by flexible customization. The hybrid linear stepper motors can be designed with different thrust screw leads according to different application loads.
The maximum thrust of the hybrid linear stepper motors can reach up to 20kN, the without load speed normally is 4 ~ 45mm/special linear speed can also be customized.
The use of hybrid linear stepper motor as an execution agency can not only reduce the gas/liquid source device and auxiliary equipment required to use pneumatic and hydraulic pressure, but also reduce the weight of the execution agency.
Applications:
The application of hybrid linear stepper motor is very wide, including the followings,
- Mechanical driver: Screw motors can directly drive machinery, such as machine tools, textile machines, etc.
- Electronic driver: The screw motor can be connected to the electronic equipment, such as electronic clocks, electronic printers, etc.
- Medical equipment: In the field of medical devices, high -precision mechanical transmission parts need to be used to ensure the accuracy and stability of medical devices. The application of high -precision bead screws in medical devices can improve the accuracy and stability of medical devices, and can also reduce the failure rate of medical devices. For example, high -precision rolling bead screw among medical equipment such as radiation therapy robots and CTs is widely used.
- Industrial automation: Screw motor can be used in the field of industrial automation, such as robots, production lines, etc.
- Aerospace: Used in the field of aerospace, such as aircraft, missiles, etc.
The performance characteristics:
- Simple structure: The structure of the screw motor is simple, easy to manufacture and repair.
- Energy -saving: The efficiency of the screw motor is high, which can save energy.
- High -speed operation: The screw motor can achieve high -speed operation and improve work efficiency.
- Low noise: The noise of the screw motor is low, and the impact on the working environment is less.
- Long life: The life of the screw motor is long, which can run stable for a long time.
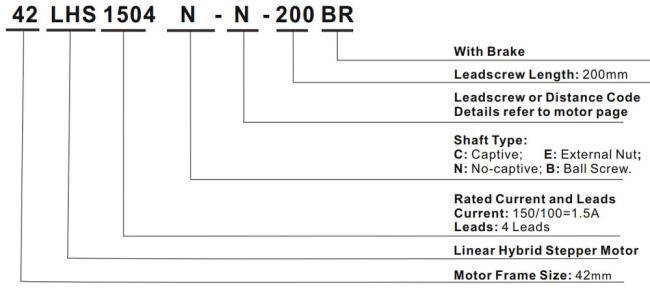
2. Hybrid Stepper Motor Naming Rules and General Technical Specifications
Linear stepper motor naming rules,
General Specifications,
| Step Angle | 1.8° (2 Phase) |
| Step Angle Accuracy | ±0.09° |
| Size | Nema 8 |
| Insulation Grade | 500VDC, 20 MΩ Min. ,Class B |
| Dielectric Strengt | 500 VAC for 1 Minute |
| Temperature Rise | Less than 80℃ (Rated Current) |
| Suface Temperature | Max.Allowed 100℃ |
| Humidity Range | 20% to 90% RH |
| IP Grade | IP40 |
| Certificates | Rohs, CE, CCC |
3. 20LHS0494/0244/0164 Captive Type Hybrid Linear Stepper Motor Performance Datasheet
| Model Name | Wiring |
Rated Voltage |
Rated Current |
Resistance /phase |
Inductance /phase |
Power Consumption | Temp. Rise | Weight |
Insulation Resistance |
|
20LHS0494
20LHS0244
20LHS0164 |
Bipolar |
2.5V | 0.49A | 5.1Ω | 1.5mH | 2.45W | 75℃ | 43g | 20MΩ |
|
5V |
0.24A |
20.4Ω | 5.0mH | ||||||
|
7.5V |
0.16A |
45.9Ω | 11.7mH |
Note: Customization of motor specifications available.
Available leadscrew specifications,
| Code | Leadscrew Thread Dimensions in mm | ||
| diameter | step | lead | |
| U | φ3. 5 | 0.001524 | 0.3048 |
| N | φ3. 5 | 0.003048 | 0.6096 |
| K | φ3. 5 | 0.006096 | 1.2192 |
| J | φ3. 5 | 0.012192 | 2.4384 |
| Code | Leadscrew Thread Dimensions in mm | ||
| diameter | step | lead | |
| AB | φ3. 5 | 0.005 | 0.5 |
| AC | φ3. 5 | 0.01 | 1.0 |
| AD | φ3. 5 | 0.02 | 2.0 |
| AE | φ3. 5 | 0.04 | 4.0 |
4. Mechanical Dimensions (in mm)

| Distance code | distance/mm | A/mm | B/mm |
| 301 | 9 | 11.1 | 1.58 |
| 302 | 12.7 | 14.81 | 5.28 |
| 303 | 19.1 | 21.16 | 11.63 |
| 304 | 25.4 | 27.51 | 17.98 |
| 305 | 31.8 | 33.86 | 24.33 |
| 306 | 38.1 | 40.21 | 30.68 |
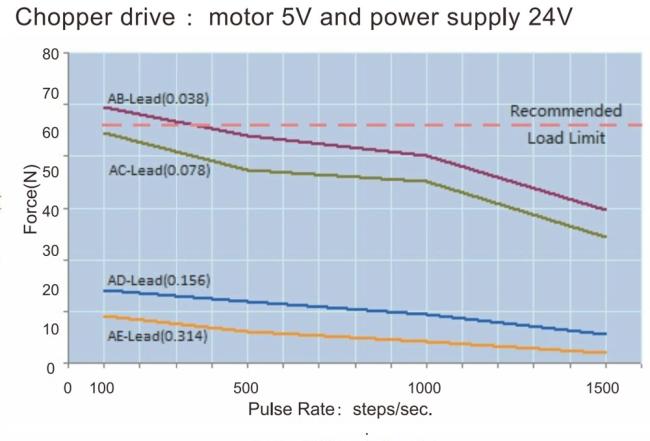
5. Force and Pulse Rate Curves

6. Wirings

7. Faults Checking
During use, there may be some faults in the hybrid linear motors. Common faults include strolls, excessive noise, and overheating. The loss may be caused by insufficient motor resolution and mechanical transmission error. It can be solved by adjusting the subdivision of the motor -driven signal. Excessive noise is likely to be caused by high motor speed and mechanical resonance. It can be eliminated by reducing the speed of the motor and adjusting the mechanical structure. Excessive heat may be caused by the long -term work and poor heat dissipation, which can be improved by strengthening heat dissipation and reasonable arrangement.
Get in Touch
Have questions about our products or want to discuss a custom order? Our team is ready to help you.