
High Current Driver Dc Servo Motor Communication Protocol For EtherCAT CANopen
DC Servo Drives High Power Density High Current Driving Standard Communication Protocol For EtherCAT CANopen
DC Servo Drives High Power Density high current driving Standard communication protocol for EtherCAT CANopen
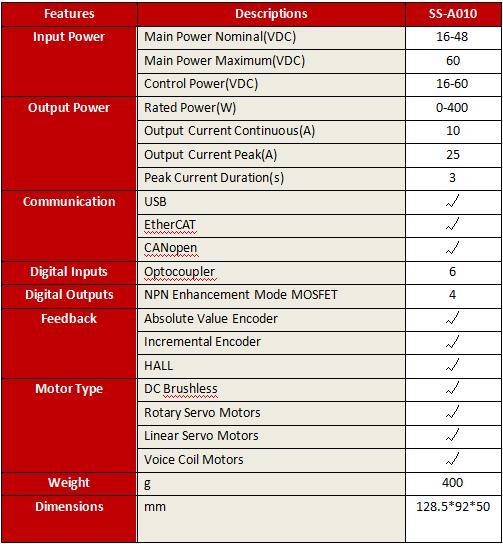
· High power density.Compact design(compact power supply/compact servo/compact motor);light weight;small size;
· Different encoder feedback(abs/incremental/hall) Different motor types(rotating motor/linear motor/BLDC/torque motor).
· Standard communication protocol for EtherCAT & CANopen.
· Current bandwidth 2.5KHz;high current driving.
· High performance algorithm:PPPVPTHMCSPCSVCST; IIR FIR filter;dynamic PID.
· High and flexible control loop order to deal with any mechanical dynamic system characteristic.
· Smart pc tools, local language interface,easy using; easy input for parameters; patterning tuning.
· Isolated signal input from power input;surge suppression,back EMF protection.
· Complies with safety, EMC and Environmental standards.
· Utmost efficiency of up to 99%.
Application area

Product certificate

FAQ
1.How can I get the price?
-We usually quote within 24 hours after we get your inquiry(Except weekend and holidays). If you are very urgent to get the price, please email us or contact us in other ways so that we can offer you a quote.
2. Can I buy samples placing orders?
-Yes.Please feel free to contact us.
3.What is your lead time?
-It depends on the order quantity and the season you place the order.
Usually we can ship within 7-15 days for small quantity,and about 30 days for large quantity.
4.What is your payment term?
-L/C, T/T, Western Union
5.What is the shipping method?
-It could be shipped by sea,by air or by express(EMS,UPS,DHL and ect).Please confirm with us before placing orders.
Get in Touch
Have questions about our products or want to discuss a custom order? Our team is ready to help you.